シェイクモードの使い方
シェイクモードとは
TWELITE 2525Aを振った時にデータを送信するモードでリモコンの入力デバイスとして使用できます。シェイクモードには振った強さを検出するモードと、振った回数を積算するモードがあります。シェイクモードは以下の動作モードが選択できます。
設定はOTA設定で行います。(p: 動作モードの変更)
ノーマル
動作モード番号:32
振られた時の力の強さに応じてDOを4段階制御します。DO1 が Lo になる時が最弱で、DO4 が Lo になると最強です。振られていない場合は DO1 〜 4 が全てHiになります。
※ 標準設定で約1秒おきに判定および無線送信します。
積算モード1
動作実演動画 (再生時間:1分03秒)
動作モード番号:33
振られたか振られていないかを検出し、以下のように DO を変化させます。
0: 全てHi
1: DO1=Lo (他は Hi)
2: DO2=Lo (他は Hi)
3: DO3=Lo (他は Hi)
4: DO4=Lo (他は Hi)
5: DO3=Lo (他は Hi)
6: DO2=Lo (他は Hi)
7: DO1=Lo (他は Hi)
8: 0に戻る
積算モード2
動作実演動画 (再生時間:1分11秒)
動作モード番号:34
振られたか振られていないかを検出し、以下のように DO を変化させます。
0: 全てHi
1: DO1=Lo (他は Hi)
2: DO2=Lo (他は Hi)
3: DO3=Lo (他は Hi)
4: DO4=Lo (他は Hi)
5: 0に戻る
積算モード3
動作実演動画 (再生時間:1分17秒)
動作モード番号:35
振る前にアンテナ面を上に向けて1.5秒以上静止させる、または、アンテナ面を下に向けて1.5秒以上静止させてから振ります。
振る前に上向きであれば、全部Hi、DO1=Lo、DO2=Lo、DO3=Lo、DO4=Lo、以後 DO4=Lo を維持、の順で DO を制御します。
振る前が下向きであれば逆に制御します。
このモードでは PWM1 の Duty 比も DO の制御と同じように、10段階で制御されます。
ホールド
動作モード番号:36
シェイクノーマルモードでは、静止が検出された場合、全DOをHiに制御しますが、本モードではこれを省略します。
全DOをHiに設定するには、アンテナ面を下にして静止させます。
<ピークホールド<
動作モード番号:37
ホールドモードと同様の制御を行いますが、より強く振られた状態を維持します。一旦最強(DO4=Lo)になると、アンテナ面を下に向けて静止しない限り状態が変わりません。
応用例
扇風機の制御
扇風機のON/OFFと風速の調整をTWELITE 2525Aでリモコン制御する例です。
振りの強さに応じて DO1 から DO4 が Lo に変化するため、この DO 出力に応じた電圧の制御を行うことで風速を変化させます。
動作実演動画 (再生時間:2分04秒)
動画では動作モード番号:36 (ホールド)を設定しています。
実装例
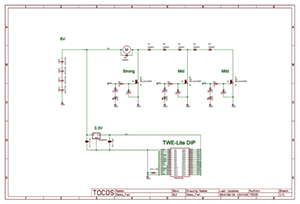
単三電池4本で動作するDCファンに強中弱の設定を無線で行えるようにします。強中弱の切り替えにはN-FETを用いました。
※ 上記回路は参考資料です。本資料に起因する損害がお客様に生じても、弊社はその責任を負いません。
| 回路図
|
|
| 回路の解説 |
|
| TWELITEの設定(扇風機側) |
|
| TWELITE 2525A の設定 |
|
LED照明の制御
LED 照明の調光とON/OFFをTWELITE 2525Aでリモコン制御する例です。消灯を含め10段階で制御します。 制御には PWM1 ポートを用います。
TWE-2525A
.
.
.
TWELITE DIP
PWM1---[抵抗]---[LED]---GND
TWELITE 2525A の設定は、
- m: センサーの設定 ---> 0x35
- p: 動作モードの変更
- 35(積算モード3) - 表を向けたあと振ると明るくなり、裏を向けた後振ると暗くなります。