導入事例ヒト型レスキューロボットコンテスト
ヒト型レスキューロボットコンテスト実行委員会
ヒト型レスキューロボットコンテストのための要救助者人形内蔵センサに採用していただきました。
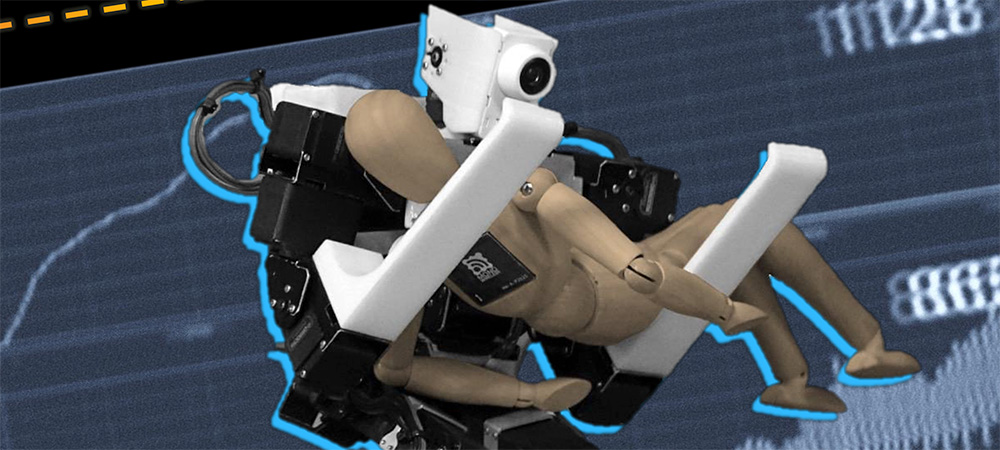
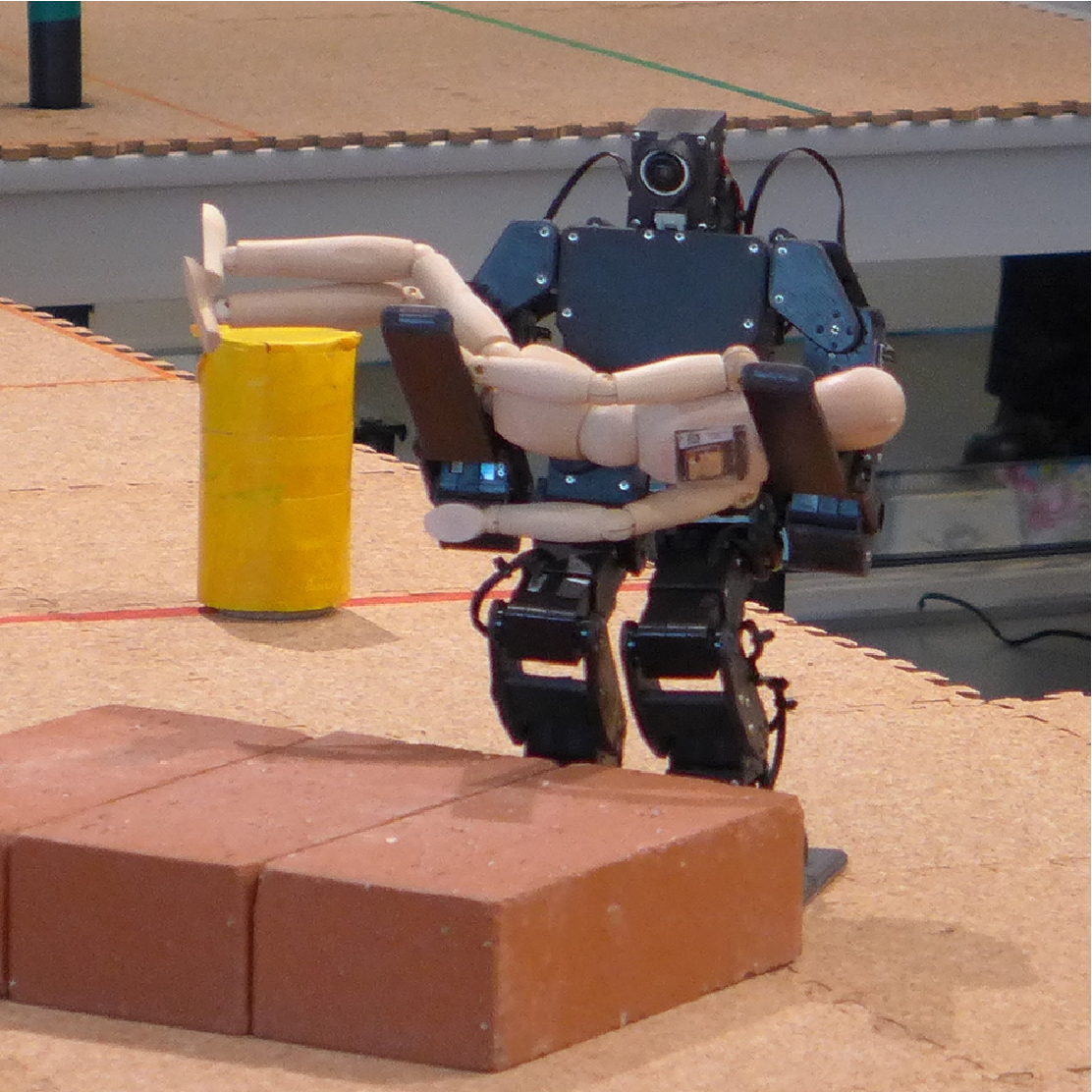
ヒト型レスキューロボットコンテストとは、ヒト型ロボットによる災害救助を題材としたロボット競技です。ヒト型ロボットを遠隔操縦して、約4m×2mのフィールド内で「トンネルくぐり」「段差乗り越え」「ガレキ除去」「要救助者搬送」の四つのタスクを順にクリアし、かかった時間の短さを競います。要救助者には、身長320mmのデッサン人形を用います。人形に無線式の加速度センサを内蔵し、その計測値に基づくセンサポイントを導入しています。そのセンサとして、TWILITEを採用していただきました。


写真提供:
ヒト型レスキューロボットコンテスト実行委員会
要救助者人形(木製のデッサン人形)に内蔵したTWILITE 2525AやTWELITE CUEからリアルタイムで加速度の計測値をPCで受け取り、それを処理して人形の衝撃と傾きを算出し、会場のモニタにグラフで表示します。同時にそれらの積算値がロボットのパフォーマンス評価の減点の対象になります。
採用理由
- 人形に内蔵できる寸法であること。
- ボタン電池で長時間動作すること。
- プログラム例が提供されていること。
- 入手しやすいこと(競技参加者も同じものを試すことができる)
連絡先
ヒト型レスキューロボットコンテスト実行委員会
https://humanoid-rescon.org/
WEBサイトの概要